
I am currently a PhD candidate at the Robotics Institute at Carnegie Mellon University. My doctoral work is on efficient motion planning for manipulation tasks. I received my B.S. in Electrical and Computer Engineering from Olin College of Engineering in 2008 and my M.S. in Robotics from Carnegie Mellon in 2012.
I am especially interested in applying state-of-the-art planning and control algorithms to real-world robotic systems. In 2008-2009, I worked as a robotics engineer at Barrett Technology, where I wrote a hard-realtime control library for the Whole-Arm Manipulator (WAM) robot. In 2012 I worked as a student on CMU's software entry into the DARPA Autonomous Robotic Manipulation competition. In 2012-2013, I worked as a robotics engineer as a core member of the software team for CHIMP, CMU's entry into the DARPA Robotics Challenge (DRC) competition, in which we placed third out of sixteen teams at the DRC Trials in December 2013.
Here is a copy of my
![]() resume.
resume.
Feb 2014 - Aug 2016
Thesis committee: Siddhartha Srinivasa, Anthony Stentz, Maxim Likhachev, and Lydia Kavraki
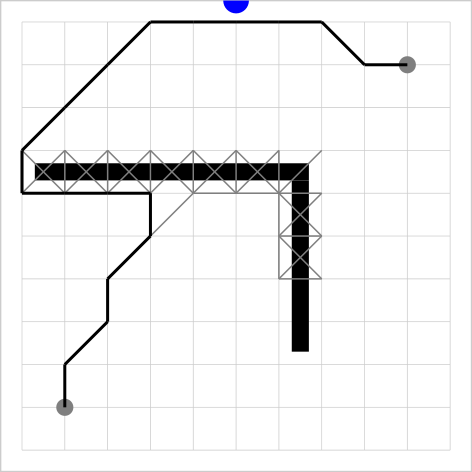
The robots of tomorrow will be required to plan high-dimensional motions in the face of geometrically complex and changing environments, and do so under significant resource constraints. My doctoral research proposes a motion planning approach well-suited to articulated robots performing recurring multi-step manipulation tasks in semi-structured environments. The approach conducts an incremental lazy roadmap search guided by a utility function which captures both planning and execution costs, allowing efficient completion of motion tasks.
![]() Dellin and Srinivasa,
A Unifying Formalism for Shortest Path Problems with Expensive
Edge Evaluations via Lazy Best-First Search over Paths with Edge
Selectors,
ICAPS 2016, London, UK.
Dellin and Srinivasa,
A Unifying Formalism for Shortest Path Problems with Expensive
Edge Evaluations via Lazy Best-First Search over Paths with Edge
Selectors,
ICAPS 2016, London, UK.
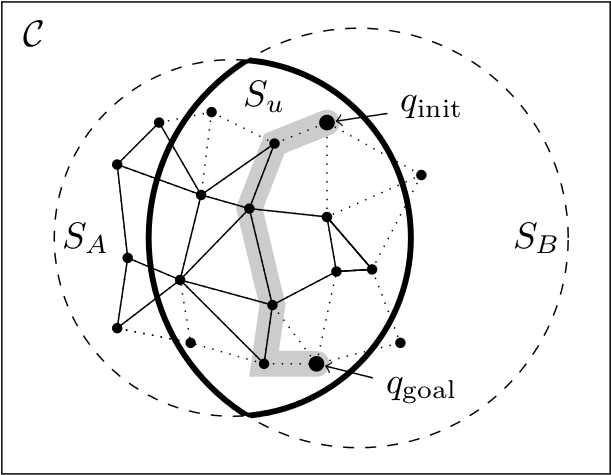
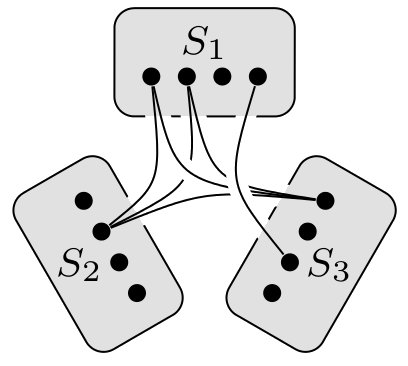
![]() Dellin and Srinivasa,
A General Technique for Fast Comprehensive Multi-Root Planning
on Graphs by Coloring Vertices and Deferring Edges,
ICRA 2015, Seattle, WA, USA.
Dellin and Srinivasa,
A General Technique for Fast Comprehensive Multi-Root Planning
on Graphs by Coloring Vertices and Deferring Edges,
ICRA 2015, Seattle, WA, USA.
![]() Dellin, Strabala, Haynes, Stager, and Srinivasa,
Guided Manipulation Planning at the DARPA Robotics Challenge Trials,''
ISER 2014, Marrakech and Essaouira, Morocco.
Dellin, Strabala, Haynes, Stager, and Srinivasa,
Guided Manipulation Planning at the DARPA Robotics Challenge Trials,''
ISER 2014, Marrakech and Essaouira, Morocco.
![]() Dellin,
Efficient Manipulation Task Planning via
Reuse-Informed Optimization of Planning Effort,
Thesis proposal, April 2015.
Dellin,
Efficient Manipulation Task Planning via
Reuse-Informed Optimization of Planning Effort,
Thesis proposal, April 2015.
![]() Srinivasa, Johnson, Koval, Choudhury, Lee, Harding, Butterworth, King,
Velagapudi, Dellin, and Thackston,
Exploiting Domain Knowledge for Multi-Step Mobile Manipulation:
Architecture, Algorithms, and Experiments,
ISER 2016, Tokyo, Japan.
Srinivasa, Johnson, Koval, Choudhury, Lee, Harding, Butterworth, King,
Velagapudi, Dellin, and Thackston,
Exploiting Domain Knowledge for Multi-Step Mobile Manipulation:
Architecture, Algorithms, and Experiments,
ISER 2016, Tokyo, Japan.
![]() Motion Planning (RRT, PRM, A*, D*, etc.), OMPL, OpenRAVE, Boost Graph Library, C++, Python
Motion Planning (RRT, PRM, A*, D*, etc.), OMPL, OpenRAVE, Boost Graph Library, C++, Python
![]() Open-source motion planner:
lemur
(bindings for OMPL,
OpenRAVE,
and PrPy),
docs
Open-source motion planner:
lemur
(bindings for OMPL,
OpenRAVE,
and PrPy),
docs
Jan 2013 - Jan 2014
Job Title: Robotics Engineer
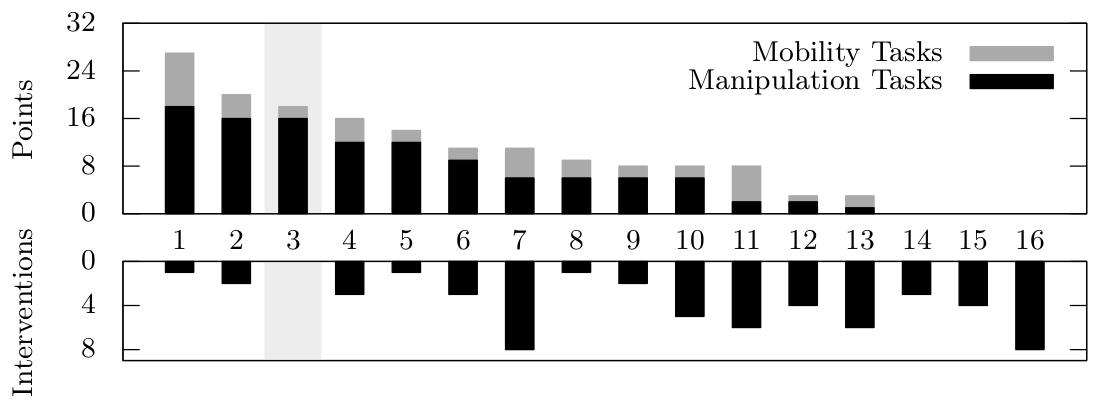
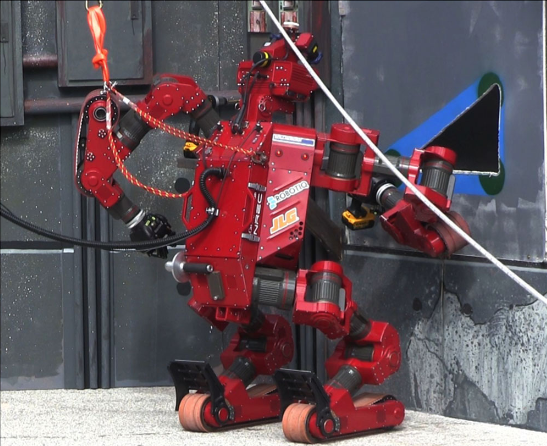
Result: Our team placed third out of 16 competitors at the DRC Trials.
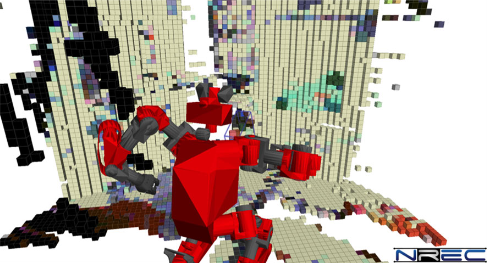
After joining the team as a graduate student in Sep 2012, I transitioned to a full-time staff position at the NREC to be involved with both hardware design and analysis of the CHIMP disaster response robot, as well as leading the manipulation and motion planning software architecture and implementation. I performed kinematic reachability and actuator analysis in order to guide the robot's design. I also designed and developed components for operator interface, behavior monitoring, trajectory execution, and the high-frequency manipulator torque control loop. During the DRC Trials competition in Dec 2013, I performed as a robot operator, helping CHIMP claim 16 of 20 available points on manipulation tasks.
Motivated in part by disaster response manipulation tasks, I decided in Feb 2014 to return to finish my doctoral work (above).
![]() Motion and manipulation planning, whole-body kinematics, multi-contact dynamics, and control, world modeling, software architecture, ROS, OpenRAVE, C++, Qt, CAN bus
Motion and manipulation planning, whole-body kinematics, multi-contact dynamics, and control, world modeling, software architecture, ROS, OpenRAVE, C++, Qt, CAN bus
![]() Stentz, Herman, Kelly, Meyhofer, Haynes, Stager, Zajac, Bagnell,
Brindza, Dellin, George, Gonzalez-Mora, Hyde, Jones, Laverne,
Likhachev, Lister, Powers, Ramos, Ray, Rice, Scheifflee,
Sidki, Srinivasa, Strabala, Tardif, Valois, Vande Weghe,
Wagner, and Wellington,
CHIMP, the CMU Highly Intelligent Mobile Platform,
Journal of Field Robotics, 2015.
Stentz, Herman, Kelly, Meyhofer, Haynes, Stager, Zajac, Bagnell,
Brindza, Dellin, George, Gonzalez-Mora, Hyde, Jones, Laverne,
Likhachev, Lister, Powers, Ramos, Ray, Rice, Scheifflee,
Sidki, Srinivasa, Strabala, Tardif, Valois, Vande Weghe,
Wagner, and Wellington,
CHIMP, the CMU Highly Intelligent Mobile Platform,
Journal of Field Robotics, 2015.
Other links: DARPA website | team website
Jun 2011 - Sep 2012
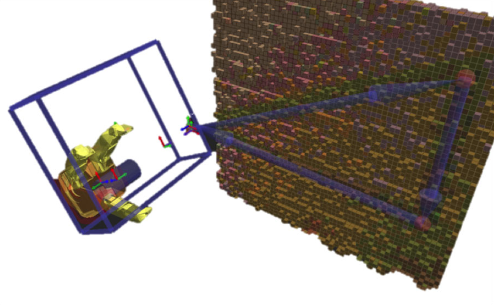
Developed algorithms for manipulation planning on the HERB robotic platform using constrained trajectory optimization. Lead developer of an open-source implementation of the CHOMP optimizer.
![]() Articulated robot motion planning, trajectory optimization, C++, OpenRAVE
Articulated robot motion planning, trajectory optimization, C++, OpenRAVE
![]() Zucker, Ratliff, Dragan, Pivtoraiko, Klingensmith, Dellin,
Bagnell, and Srinivasa,
CHOMP: Covariant Hamiltonian Optimization for Motion Planning,
IJRR 2013.
Zucker, Ratliff, Dragan, Pivtoraiko, Klingensmith, Dellin,
Bagnell, and Srinivasa,
CHOMP: Covariant Hamiltonian Optimization for Motion Planning,
IJRR 2013.
![]() King, Klingensmith, Dellin, Dogar, Velagapudi, Pollard, and Srinivasa,
Pregrasp Manipulation as Trajectory Optimization.
RSS 2013, Berlin, Germany.
King, Klingensmith, Dellin, Dogar, Velagapudi, Pollard, and Srinivasa,
Pregrasp Manipulation as Trajectory Optimization.
RSS 2013, Berlin, Germany.
![]() Open-source planning library:
libcd,
orcdchomp
Open-source planning library:
libcd,
orcdchomp
Jun 2011 - Sep 2012
Developed planning and control software for both the SRI and the Carnegie Mellon teams. Designed and implemented synchronized closed-chain torque controller for bimanual manipulation tasks.
![]() Shared-memory realtime control, task-space control, task and motion planning, Linux, C++, ROS
Shared-memory realtime control, task-space control, task and motion planning, Linux, C++, ROS
![]() Klingensmith, Galluzzo, Dellin, Kazemi, Bagnell, and Pollard,
Closed-loop Servoing using Real-time Markerless Arm Tracking.
ICRA 2013, Karlsruhe, Germany.
Klingensmith, Galluzzo, Dellin, Kazemi, Bagnell, and Pollard,
Closed-loop Servoing using Real-time Markerless Arm Tracking.
ICRA 2013, Karlsruhe, Germany.
Other links: DARPA website (archive) | DARPA BAA | IEEE Spectrum Article | NREC project website
Jun 2008 - Aug 2009
Job Title: Robotics Engineer
As one of the six engineers at the company, I developed and maintained our robotic software library, wrote embedded software for our motor controllers, performed support for customers at various research universities, and attended domestic and international conferences and trade shows. I developed a new version of Barrett's software library for the WAM (TM) robotic arm (still used today), which featured a substantial rewrite of the hard-realtime control loop, articulated kinematics and inverse dynamics algorithms, joint-space and Cartesian-space torque controllers, and trajectory execution. Designed and implemented demonstrations featuring real-time haptic feedback with real and simulated objects.
![]() Articulated kinematics/dynamics, control, haptics and teleoperation, hard-realtime control (Xenomai), Linux, C, Python, CAN bus
Articulated kinematics/dynamics, control, haptics and teleoperation, hard-realtime control (Xenomai), Linux, C, Python, CAN bus
![]() Open-source robot control library:
libbarrett (2009), (c) Barrett Technology, Inc.
Open-source robot control library:
libbarrett (2009), (c) Barrett Technology, Inc.